BBK轮眉软件调试—-标定板为四个孔的版本
棋盘格: 轮眉软件调试-棋盘格
本文未说明的地方自己琢磨吧
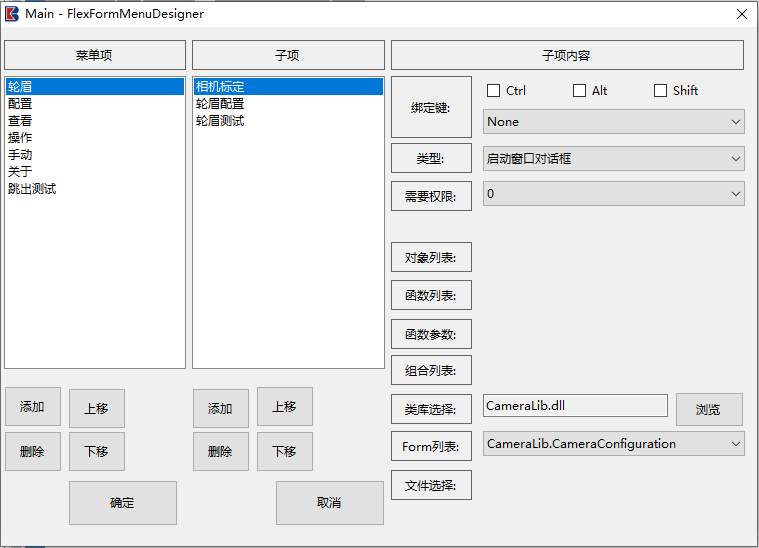
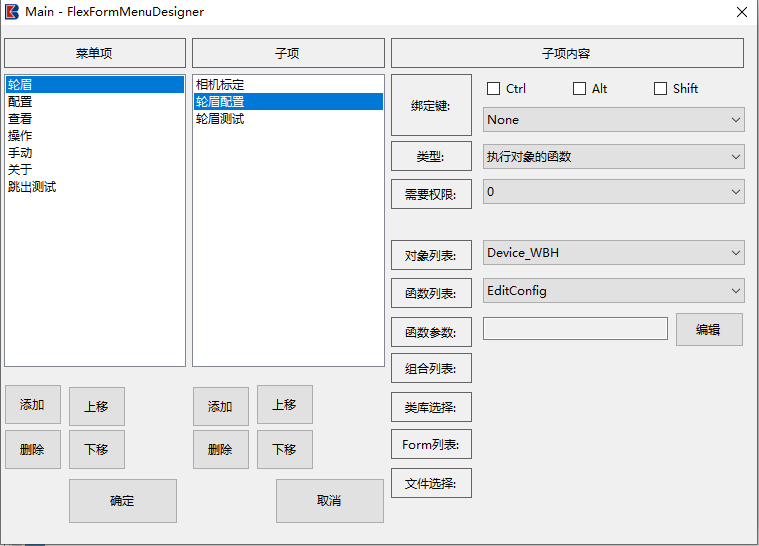
相机配置
轮眉相机配置软件菜单
标定
配置
标定界面
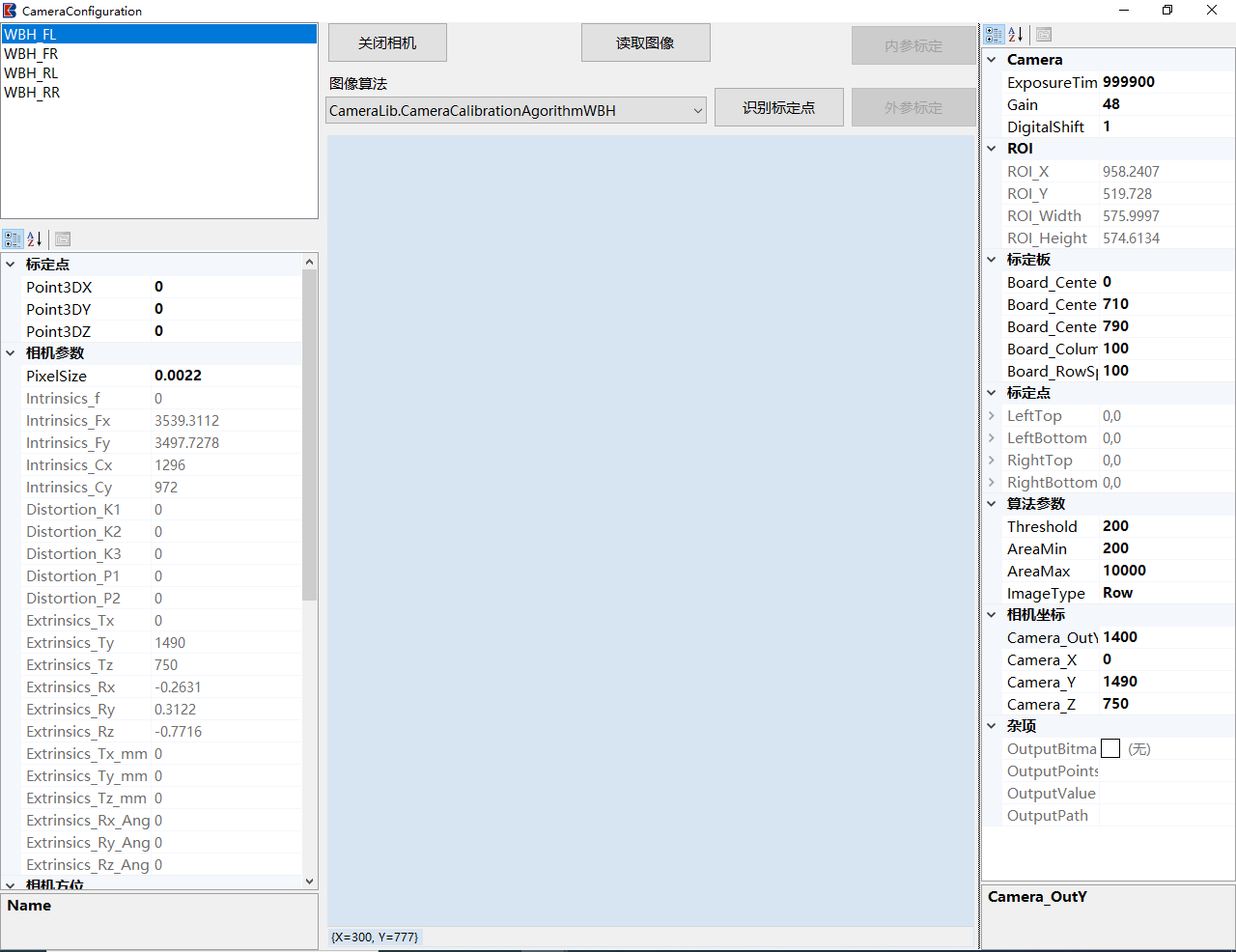
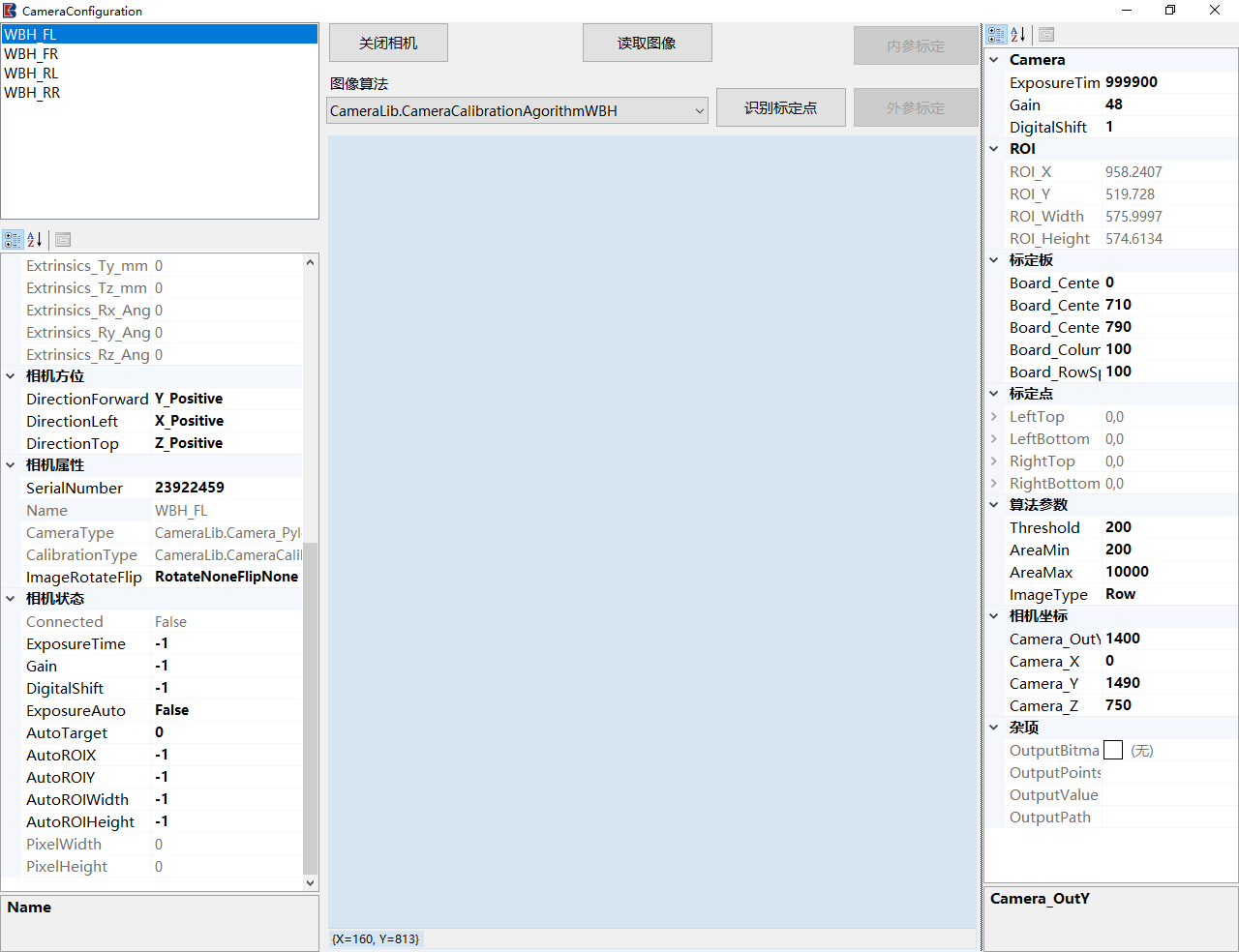
参数说明
左上角为四个相机
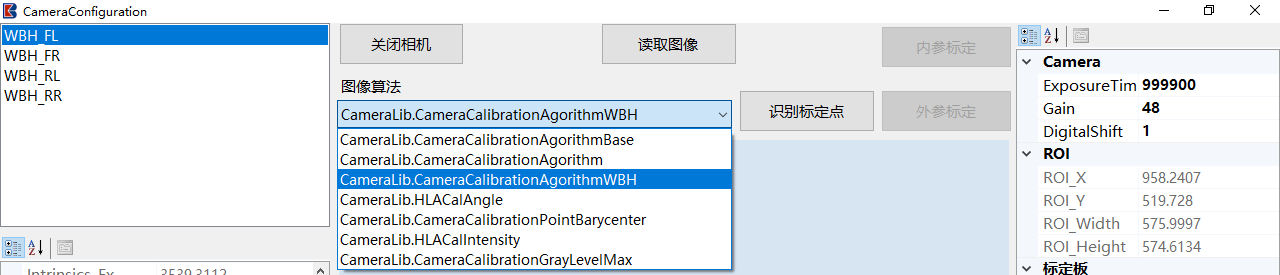
图像算法选择:
Camera: 相机参数
曝光时间
增益
数字移位n(像素值*2^n)(有滤镜的情况下标定时可配置为1)
标定板:
Board_CenterX:
Board_CenterY: 标定板后边沿(黑孔处)到标定架中心的距离
Board_CenterZ: 四个识别点组成矩形中心到地的高度
Board_ColumnSpace: 四个识别点列宽
Board_RowSpace: 四个标定点行高
算法参数:
Threshold: 二值化阈值
AreaMin: 识别点时的最小像素值
AreaMax: 识别点时的最大像素值
ImageType: 图形格式
相机坐标:
Camera_X:
Camera_Y: 相机玻璃面到标定架中心线的距离
Camera_Z: 相机玻璃面中心到地的距离
标定注意事项
标定界面通过调节曝光增益等参数使得读取的标定板图像黑白分明,能清晰看到四个标定点,然后点击识别及内外参标定.
焦距f应接近镜头实际焦距,内参标定后大概3500左右,xy相差不大
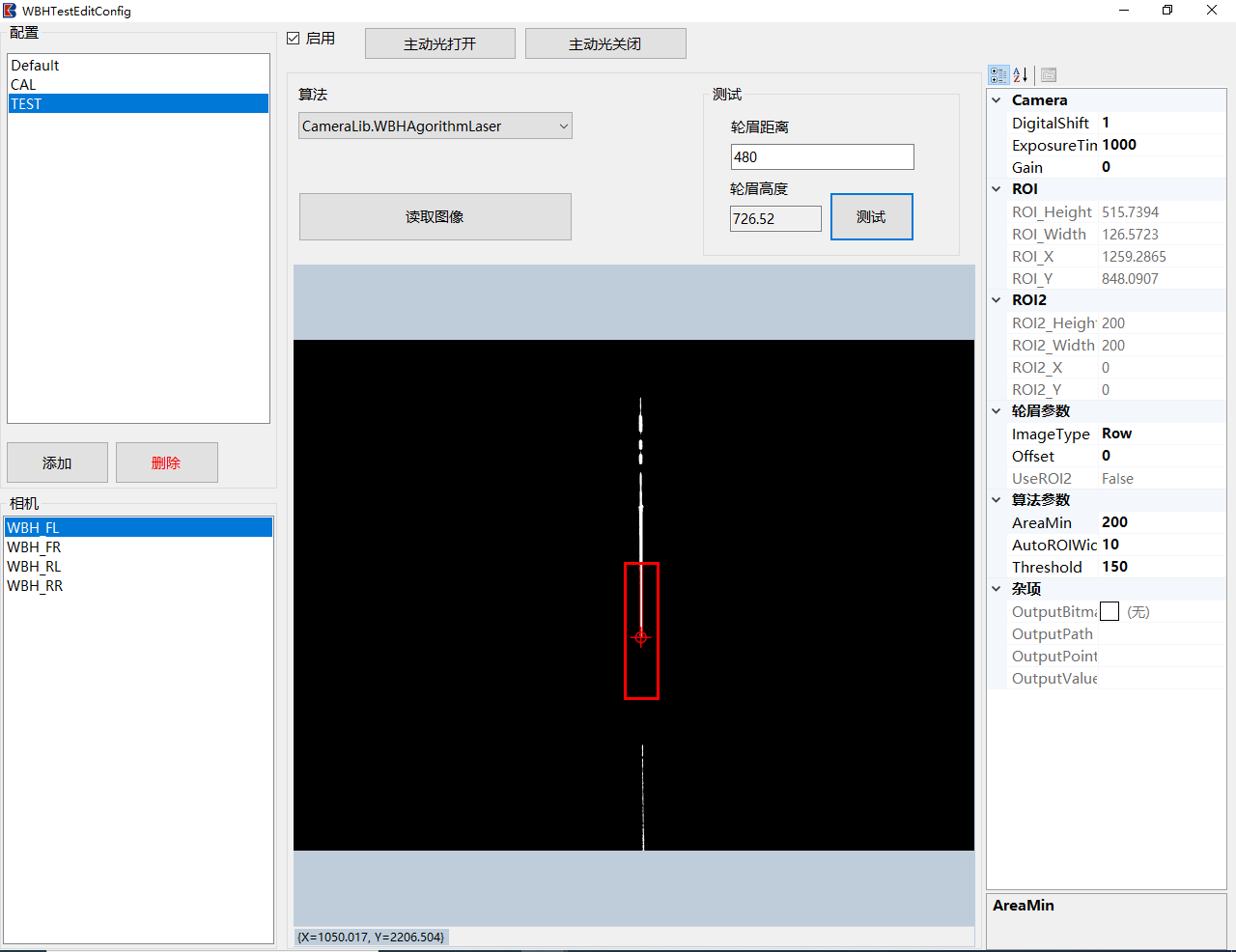
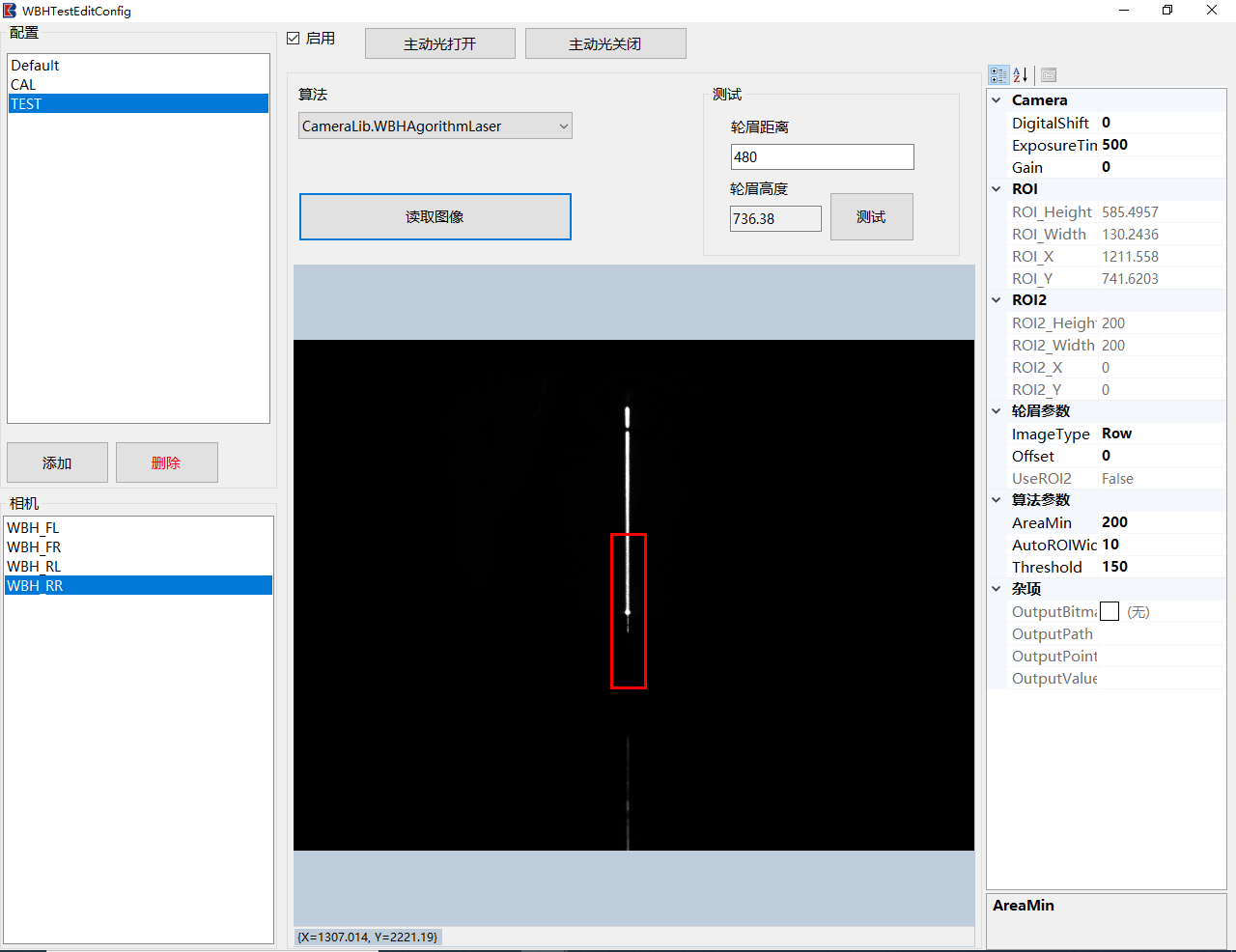
配置界面
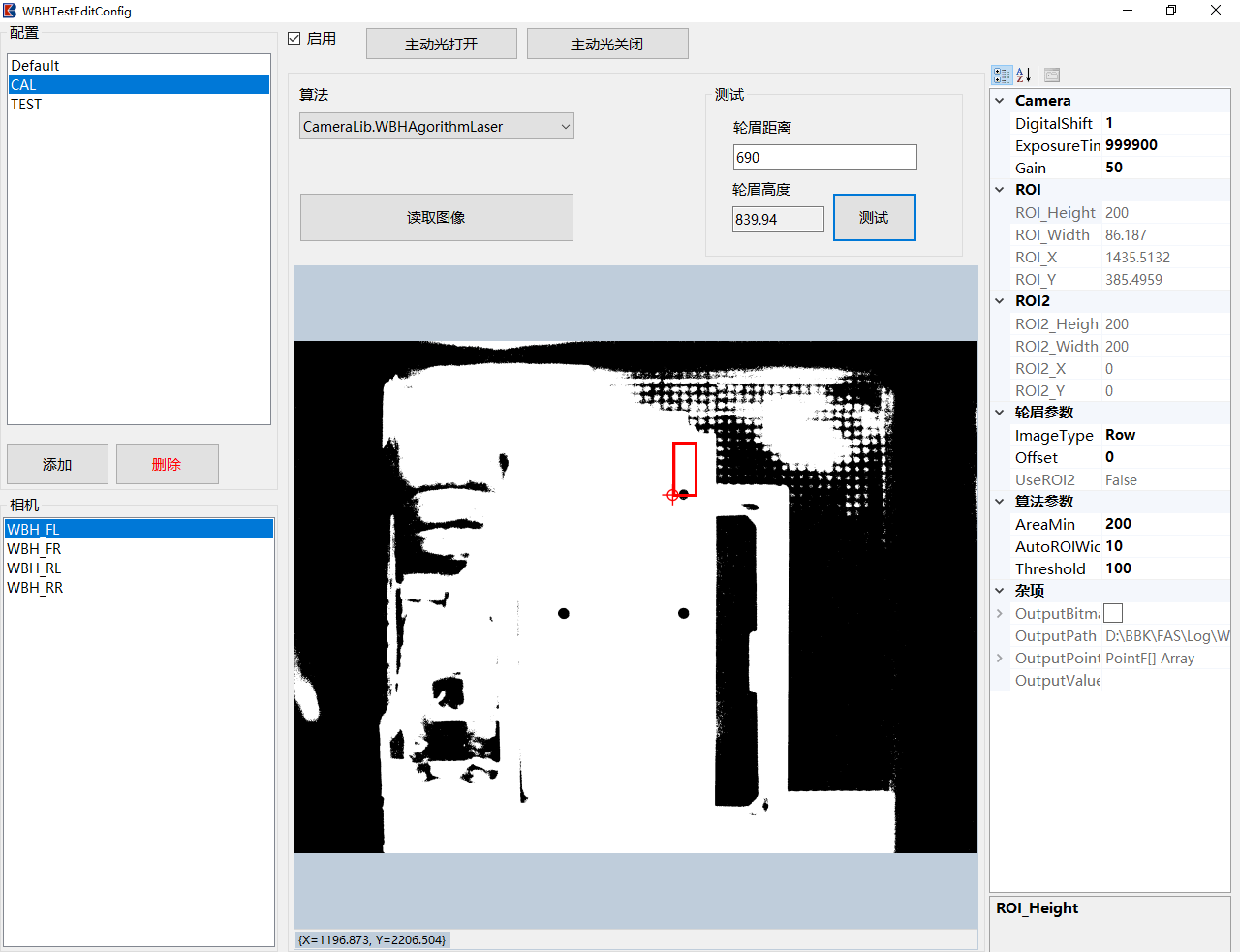
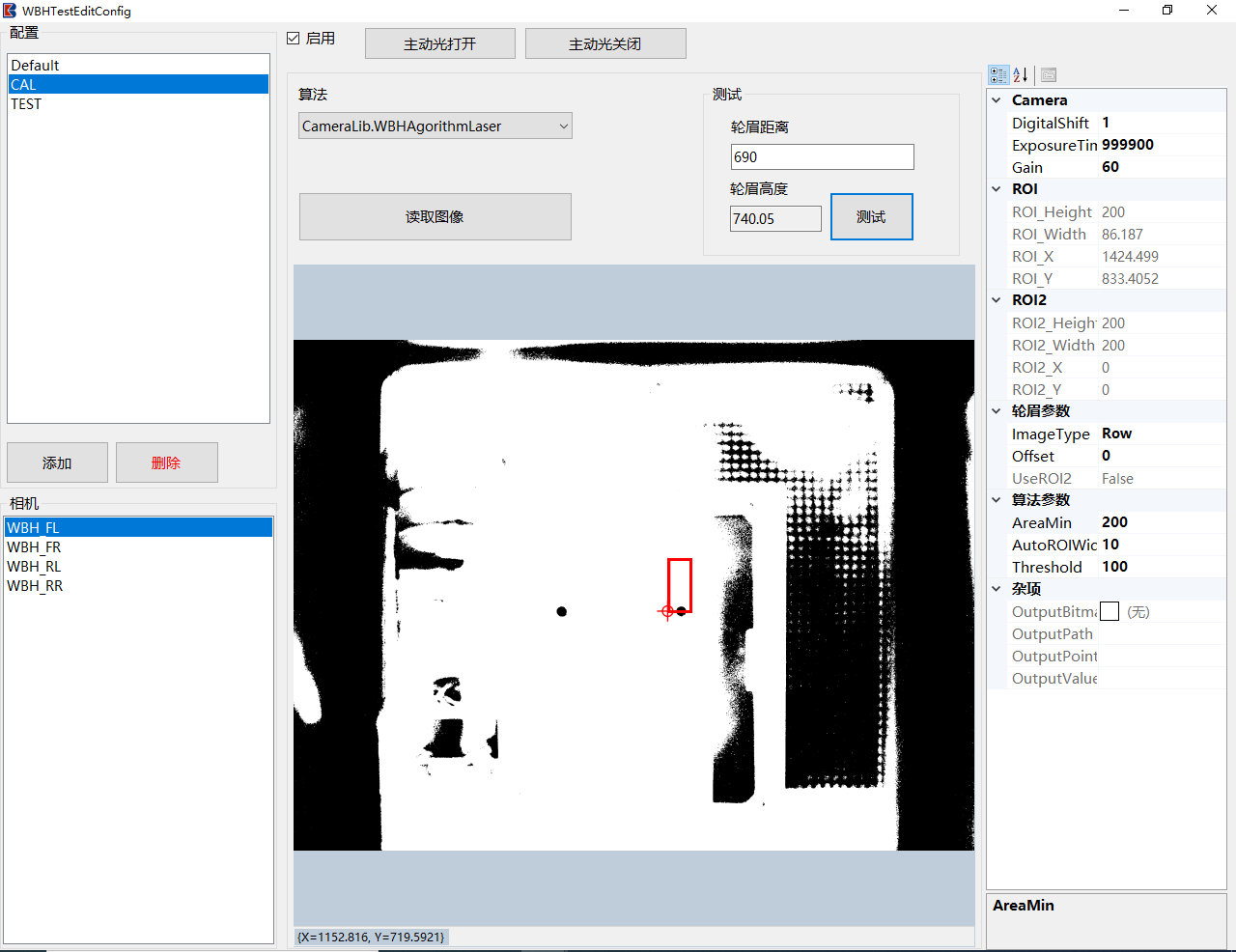
左上角为参数配置选择
左下角为四个相机
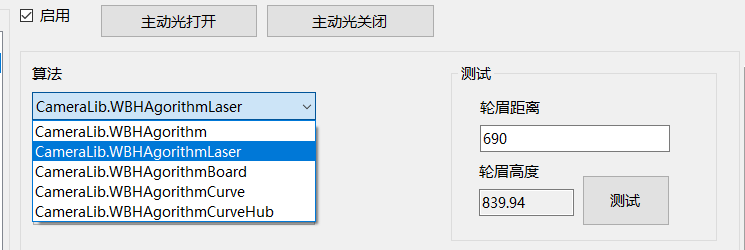
轮眉距离: 标定板后方黑点到轮眉相机前玻璃面的距离
Camera: 相机参数
曝光时间
增益
数字移位n(像素值*2^n)(一般配置为0)
轮眉参数:
ImageType:
Offset: 轮眉高度 = 计算值 + Offset
算法参数:
AreaMin: 识别时最小像素范围
AutoROIWide:
Threshold: 二值化阈值
车型配置
新建一个参数配置,上车后开启激光,调节曝光等参数使读取到的图像黑白分明,能明确识别到激光在轮眉处的断点,调整ROI大小将其框住.
软件中轮眉识别方法: 在ROI中从下往上根据设定参数识别第一个亮点.
设备图片



实车测试